
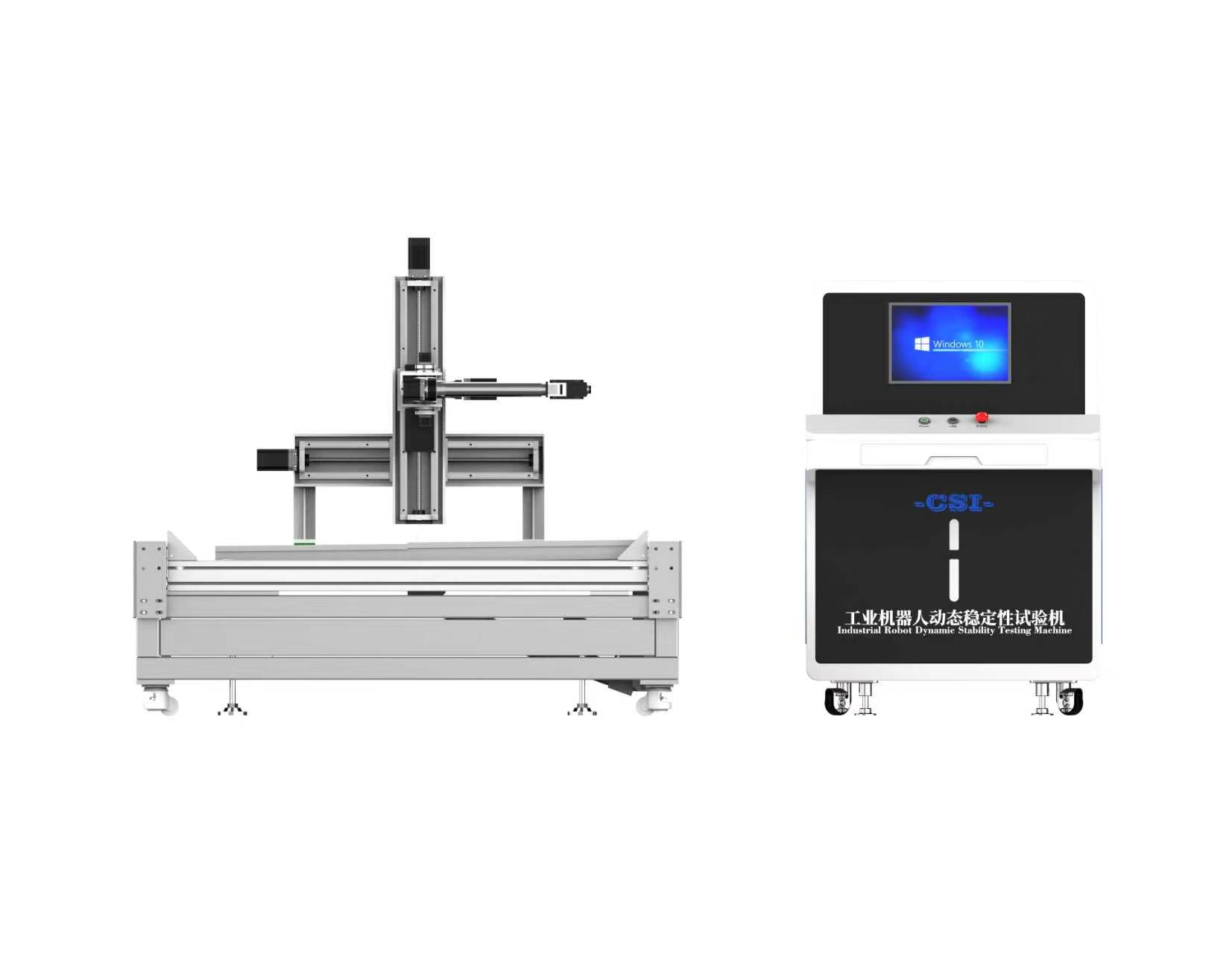
CSI-JQ002工业机器人动态稳定性试验机
一、设备用途
设备用于检测工业机器人在不同负载和速度的运动过程里末端抖动频率、抖动幅度以及停位点稳定性、抖动幅度。
二、执行标准
GB/T 45509-2025《工业机器人 动态稳定性试验方法》
三、技术参数
指标 | 参数 |
控制系统 | PLC |
操作界面 | 10寸工控机 Windows10系统 |
数据输出 | UBS导出口 |
安全防护 | 急停按钮 |
电源 | AC 220V,50 Hz |
采样速率 | ≥200Hz |
测量设备总不确定度 | ≤被测特性数值的 25% |
加速度传感器 | 量程:±50g—±500g(可根据不同机器人与应用场景选择) 灵敏度:10mV/g 频率响应:1-10000Hz(±5%) 轴向定义:X/Y/Z方向与机器人机座坐标系平行 横向灵敏度:≤5% |
信号采集仪 | 通道数:≥ 4通道(支持X/Y/Z三轴同步采集+备用) AD分辨率:≥ 24 bit 最高采样率:每通道 ≥ 25.6 kHz 抗混叠滤波器:内置模拟滤波器 + 数字滤波器 动态范围:≥ 110 dB |
激光跟踪仪
| 空间坐标精度:≤ ±15 μm + 6 μm/m(在全量程40m内) 空间坐标重复性:≤ ±2.5 μm 最大采样速率:≥ 1000 点/秒(1 kHz) 角度分辨率:≤ 0.5 角秒 靶球规格:1.5英寸(38.1mm)和0.5英寸(12.7mm)光学反射球 动态追踪能力:最大径向加速度 ≥ 30 m/s² |
四、设备特点
1、分体成套一体化配置
测量龙门主机与独立控制机柜成套配套出厂,机械测量、信号采集、运算控制系统完整整合,整机联调完毕,到场即可开展试验,无需零散配件拼装
2、三轴quan方位调节对位
搭载X/Y/Z三维龙门滑台,探头可多维度平移升降,适配不同臂展、不同安装姿态的工业机器人测点对位,通用性强
3、移动锁止两用底座
工作台配备可锁脚轮+水平调节支撑脚,方便移位摆放,测试时锁紧支撑,杜绝机身自身晃动干扰测量
4、集成式触控智能操控
控制柜一体式嵌入工控机,搭配实体电源按键,全自动执行国标整套试验流程,人机操作直观简便
5、标准化测量架构匹配国标
整机采用标准附录A动态信号测量分析系统和激光跟踪仪,硬件架构wan全适配GB/T 45509-2025试验要求
6、稳固重型机架结构
加厚型材,机身刚性足,自身固有振动低,不会对机器人抖动检测造成额外误差干扰
7、探头微调支架设计
悬臂末端带微调安装结构,可精细校正传感器测点角度,保证测量轴线对准机器人末端检测位置
五、试验前提条件
机器人应装配完毕,并可全面操作。所有必要的校平操作、调整步骤及功能试验均应完成。试验开始前应根据制造商的建议安装机器人。
六、试验环境条件
测试环境温度应满足20°C±2°C,采用其他环境温度应在试验报告中指明。为保证被测机器人及测试设备在试验开始前处于热稳定状态,需要将它们置于试验环境中至少24h。
七、试验场地要求
测试设备不应放在靠近热源,空调出风口、窗口、门口、地板接缝处及阳光能够直射到的地方。工作地周围不应有大型机械及车辆工作,不应有噪声、振动干扰,周围无强电磁场、无腐蚀性液体
八、试验方法
1、末端抖动频率试验:直角轨迹(直线 / 大圆 / 小圆 ), 额定速度(100%/50%/10%)、 额定负载(100%/10%),每种工况循环≥10 次
2、末端抖动幅度试验:直角轨迹(直线 / 大圆 / 小圆 ), 额定速度(100%/50%/10%)、 额定负载(100%/10%),分别读取(或计算)机器人末端X、Y、Z方向的末端抖动幅度;每种工况循环≥10 次
3、停位点稳定性试验:P2→P1 点位,测稳定时间 T、最大超调量 D,额定速度(100%/50%/10%)、 额定负载(100%),每速度循环≥3 次;
4、停位点抖动幅度试验:试验步骤与停位点稳定性试验相同,需要在进行停位点稳定性试验试验的同时,采用抖动特性试验设备同步采集末端抖动特性,可采用同步触发器保证运动特性和抖动特性试验设备在同一时间下进行采集,记录试验数据后,分别读取(或计算)停位点稳定时间T后的机器人末端X、Y、Z方向的末端抖动幅度
九、配置清单
测量主机1台;
控制机柜1台
说明书1份;
合格证1份;
保修卡1份;
签收单1份;
铭牌1块;
电源线1根;
扳手1套;
